Live Demonstration: Prevention and prediction of biomechanical risks in work environment
IEEE SENSORS 2023 | 11/2023

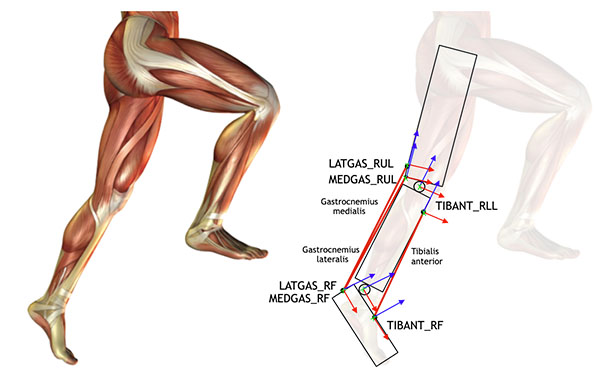
Real-time lower leg muscle forces estima- tion using a Hill-type model and whole-body wearable sensors
5th Italian Conference in Robotics and Intelligent Machines (I-RIM) | 10/2023

Towards a real-world application of wearable sensors for musculoskeletal disorders prevention: the iFeel Wired Suit
IEEE-EMBS International Conference on
Body Sensor Networks:
Sensor and Systems for Digital Health
(IEEE BSN 2023) | 09/2023