Why
A humanoid robot for heavy-lifting tasks
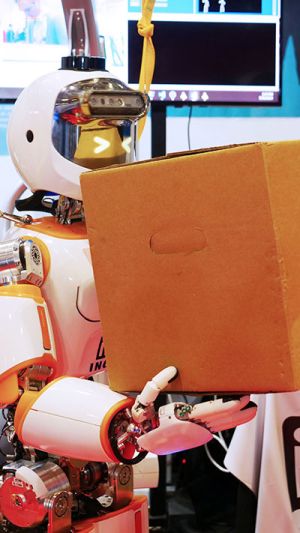
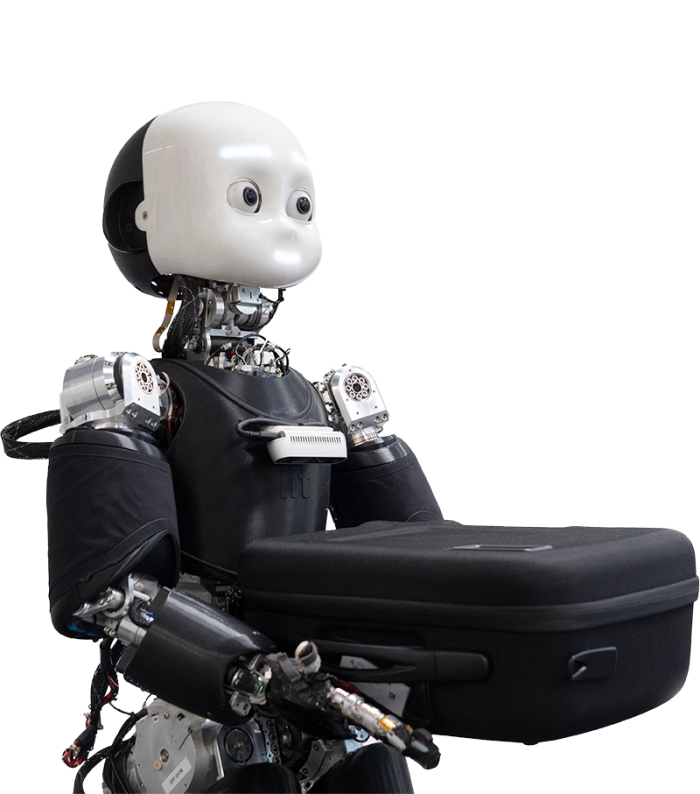
The ergoCub project has developed a humanoid robot called ergoCub, which is an evolution of the humanoid robot iCub with the principal objective of designing a robot suitable for physical collaboration tasks.
While wearable technologies are essential tools for monitoring and predicting biomechanical risk, they lack the capability to reduce risk when a specific task is being executed. Wearable technologies are fundamentally passive devices.
For instance, consider a weightlifting task; if the task is necessary and is performed, the worker will have to carry out the task even if monitored by wearable technologies. Therefore, there is a need for fatigue-resistant machines capable of handling the biomechanical risk for workers engaged in potentially hazardous tasks.



Facts and Numbers
ergoCub specifics
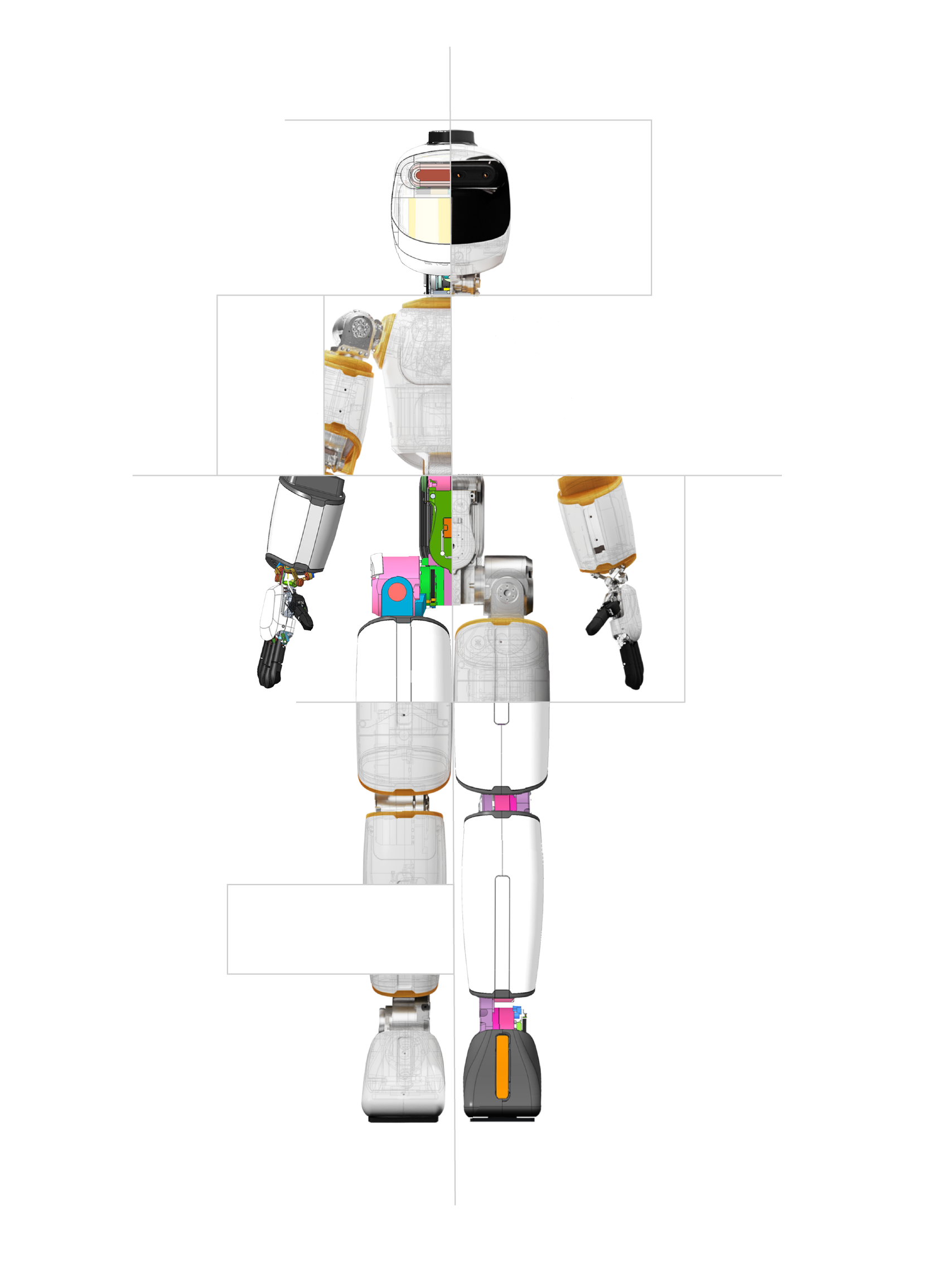
The ergoCub humanoid robot was designed considering ergonomic elements during the design phase: its geometry minimizes the so-called energy consumption of human-robot joint effort during lifting tasks. This design approach has resulted in a 1.5m tall humanoid robot weighing 55.7 kg, capable of carrying loads of up to approximately 10 kg.
A.I. FOR THE ROBOT PHYSICAL INTELLIGENCE
 A.I. FOR THE ROBOT
A.I. FOR THE ROBOT
PHYSICAL INTELLIGENCE